本文适用于西安工业大学物联网工程专业的物联网通信与控制技术课程的闭卷随堂期末考试。
名词解释*10
RFID:Radio-frequency identification 射频识别(通过无线电信号识别特定目标并读写相关数据的无线通信技术)
MEMS:Micro electro mechanical Systems 微机电系统(微电子技术+机械)
OCR:Optical Character Recognition 光学字符识别(图像/视频->文字&排版信息)
ADC:Analog-to-digital converter(A/D)模拟数字转换器
I2C:Inter IC 内部集成电路总线(飞利浦公司,微处理器连接到系统的一种双向二进制同步串行总线)
SPI:Serial Peripheral Interface 串行外设接口(摩托罗拉开发,定义如名)
UART:Universal Asynchronous Receiver/Transmitter 通用异步接收发送器(并行->串行。全双工,单极性,接口自动生成起&止位)
SSR:Solid State Relay 固态继电器(固态电子元件组成的无触点功率型电子开关)
DDC:直接数字控制
SCC:监督控制
DCS:distributed control system 集散/分布式控制
PLC:可编程控制器
PID:比例(P)-积分(I)-微分(D)
简答/作图*10
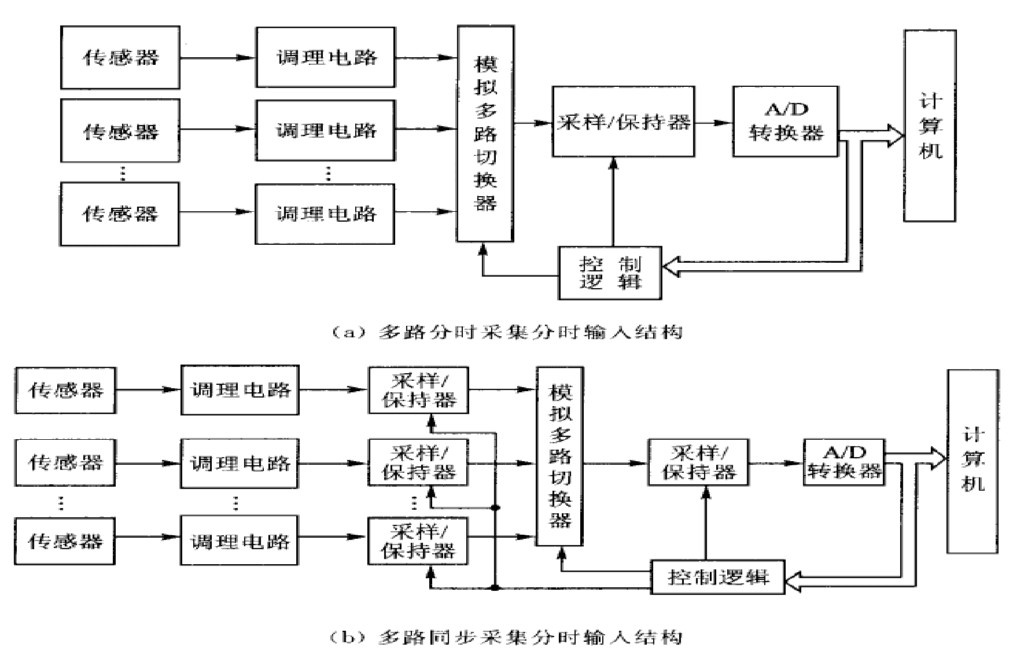
单路采集

多路分散采集&多路集中采集
(重)x位逐次逼近式A/D转换器原理
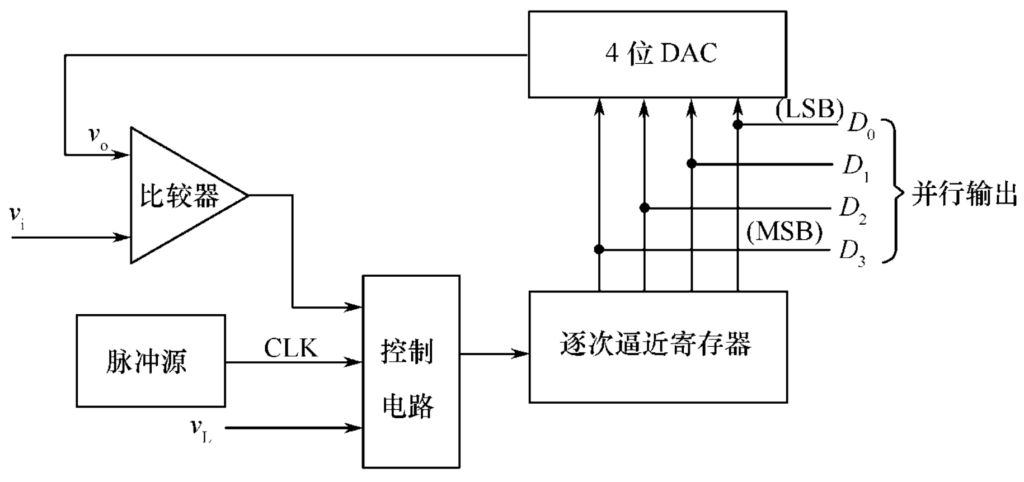
转换启动:转换开始前逐次逼近寄存器输出清零,4位DAC输出V0=0。转换控制信号VL=1时开始转换。
第一个时钟:在CLK第一个时钟脉冲作用下,控制逐次逼近寄存器最高位输出为1,其余位输出0,即逐次逼近寄存器输出1000。
进入D/A转换器:进入D/A转换器,经D/A转换器转换为与之对应的模拟电压V0,送入比较器与模拟输入信号Vi进行比较。
若V0>Vi,说明数字量1000太大,高位的1应去掉
若Vi>V0,说明数字量1000不够大,高位的1应保留。
在第二个时钟脉冲作用下,按同样的方法将次高位置1,使寄存器输出1100(最高位的1保留时)或0100(最高位的1丢掉时),并送入比较器与输入信号Vi进行比较,从而确定次高位的1是否应该保留。按此方法逐次比较,直至最低位比较完后,转换结束。
逐次逼近型A/D转换器的转换时间取决于输出数字位数n和时钟频率,位数越多,时钟频率越低,转换所需要的时间越长。
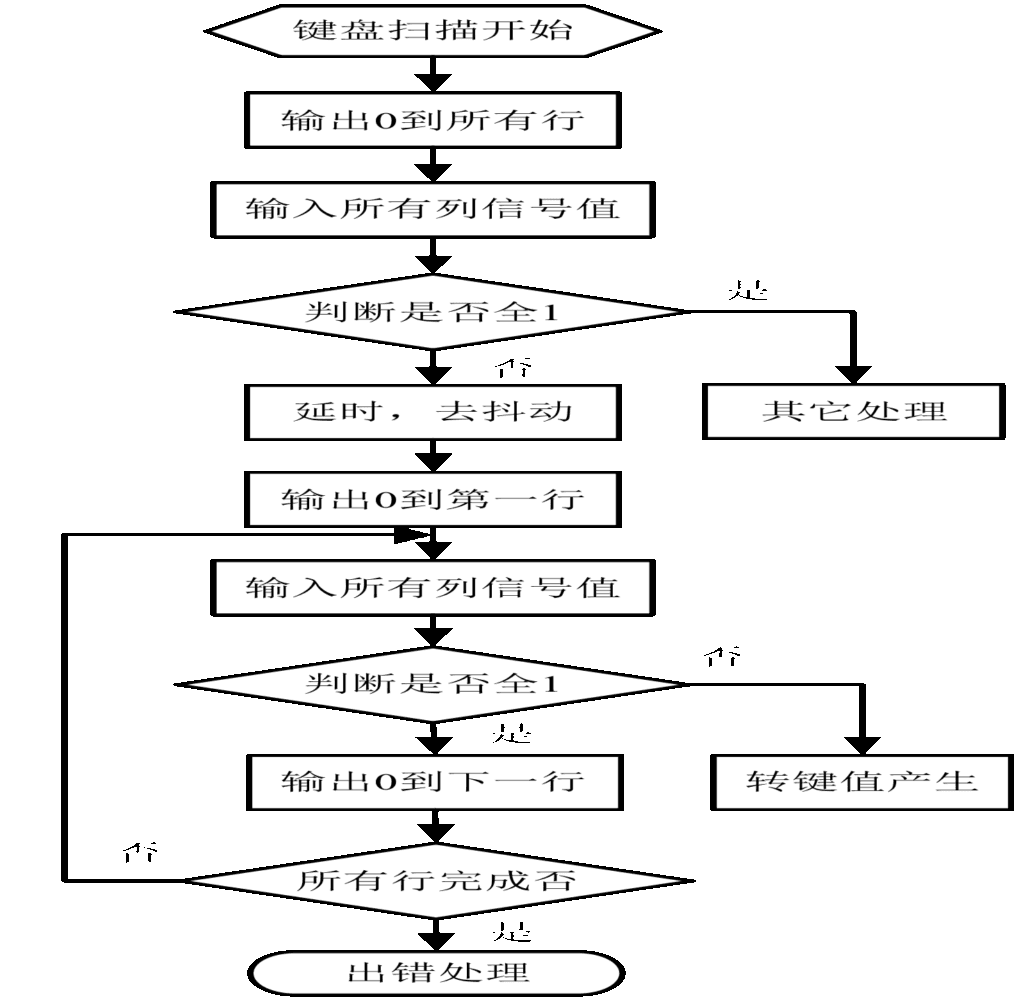
非编码矩阵式键盘
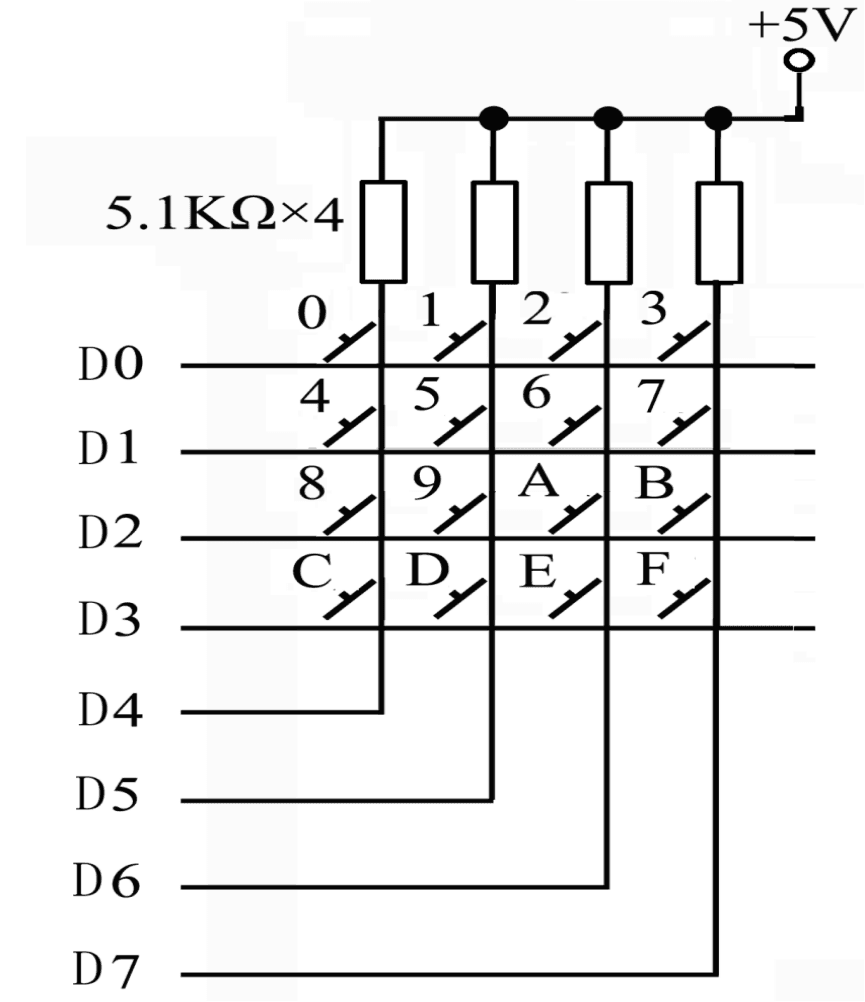
排列成4*4矩阵式结构;每条列线接上拉电阻;无键按下时,行线与列线不相连;当某个键按下时,该按键所在的行、列相连
键盘的行信号线和列信号线均由微处理器通过I/O引脚加以控制。微处理器通过输出引脚向行信号线上输出全0信号,然后通过输入引脚读取列信号。若键盘阵列中无任何键按下,则读到的列信号必然是全1信号。如有按键按下时就会产生非全1信号。若是非全1信号时,微处理器再逐行输出0信号,来判断被按下的键具体在哪一行和哪一列上,然后产生被按键所对应的行和列的位置(键码)。
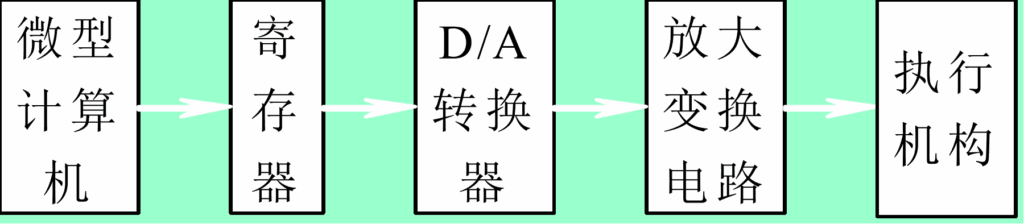
单路模拟量输出
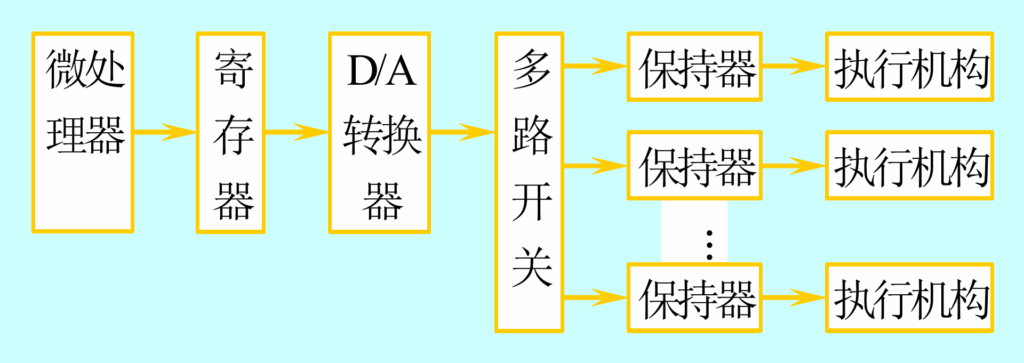
多路模拟量输出
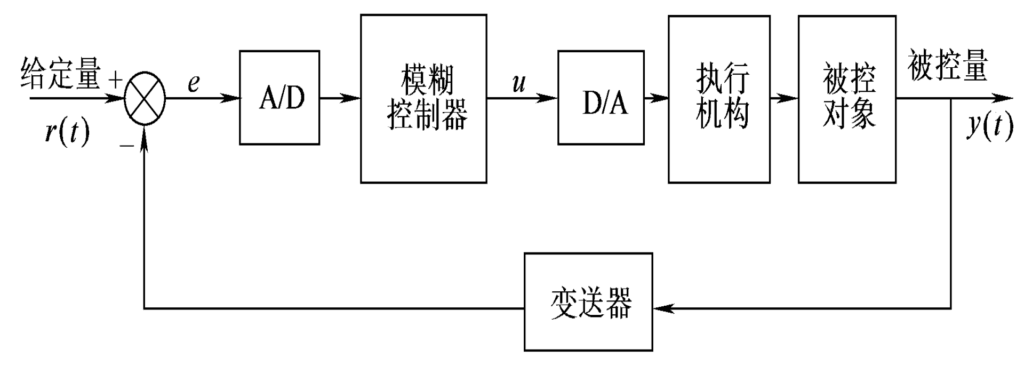
模糊控制
综合*1
测量数据的标度变换
Ax = (Am-Ao)(Nx-No)/(Nm-No)+Ao
那个“o”是下标“0”
式中,Ao为测量仪器的下限值,Am为测量仪器的上限值,Ax为实际测量值,No为仪器下限所对应的数字量,Nm为仪表上限所对应的数字量,Nx为测量值所对应的数字量。
例题: 在某压力测量系统中,压力测量仪表的量程为400~1200 Pa,采用8位A/D转换器,经计算机采样及数字滤波后的数字量为ABH,求此时的压力值。
解:根据题意,已知Ao=400 Pa,Am=1200 Pa,
Nx = ABH = 171D,选Nm = FFH =255 D,No =0,所以可得:
Ax = (Am-Ao)(Nx/Nm)+Ao
= (1200-400)×(171/255)+400
= 936(Pa)
论述*1
与大作业论文相关,热点前沿技术,500-600字
其它
第一章
发展物联网意义:推互联网+,降本,提安全,AI & Big Data,5G
五大阻碍发展因素:个人隐私&数据安全,公众信任,标准化,研究发展,系统开放
物联网有线通信技术:串口(RS232,RS422/RS485等),以太网
第二章
传感器与应用技术
传感器定义/概念
物理/化学量->电信号,获取被测信息、完成信号检测与转换。
组成
敏感元件、变换元件、其他辅助元件。
分类
转换原理:物理(可靠,广泛)、化学
用途:压力、力敏传感器、位置传感器、液面传感器、速度传感器、热敏传感器、射线辐射传感器、振动传感器、湿敏传感器、气敏传感器、生物传感器blabla
输出信号:模拟传感器、数字传感器、开关量传感器等
选用原则
被测量量特点,传感器的量程、体积、测量方式(接触式还是非接触式)、信号的输出方式、传感器的来源(国产还是进口)、价格等
性能指标
线性范围:输出/输入>0的范围(越宽,量程越大)
精度(不解释)
灵敏度:越高,输出信号变化越大(干扰也是)
稳定性:性能不随时间变化的能力
频率响应特性:越好,被测量频率范围越宽(实战时候延迟越低越好)
MEMS微机电系统
定义
传感器+信号处理器+执行器
特点
敏感、决定、反应的能力
特性
微型化零件:两维、扁平
自动识别(条码,OCR)
二维码:特性(信息量大,自纠错),类型(线性堆叠式、矩阵式、邮政条形码)
第三章
模拟信号检测(静态检测)
概念:测量时,检测系统的输入、输出信号不随时间变化或变化很缓慢
响应特性指标:测量范围、灵敏度、非线性度、回程误差等
理想的线性装置的标定曲线是直线
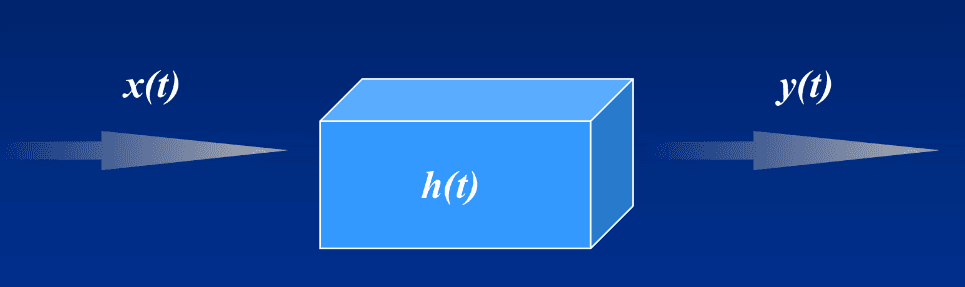
标定:给出标准的 x(t) ,读出相应的y(t) ,定下 h(t)
自检:h(t)一定,给出标准的 x(t),读出 y(t)
测量:h(t)一定,读出 y(t),推断 x(t)

参数定义:基本特性(量程、灵敏度、分辨率),误差特性(准确度(精度)、线性度、重复性、迟滞性、漂移)
数字信号、非电量参数检测
全你妈画图,如开头咯
单路采集方式
传感器->模拟信号调理电路->采样/保持 模/数转换->嵌入式微处理器
多路采集方式
x位逐次逼近式A/D转换器原理
转换启动:转换开始前逐次逼近寄存器输出清零,4位DAC输出V0=0。转换控制信号VL=1时开始转换。
第一个时钟:在CLK第一个时钟脉冲作用下,控制逐次逼近寄存器最高位输出为1,其余位输出0,即逐次逼近寄存器输出1000。
进入D/A转换器:进入D/A转换器,经D/A转换器转换为与之对应的模拟电压V0,送入比较器与模拟输入信号Vi进行比较。
若V0>Vi,说明数字量1000太大,高位的1应去掉
若Vi>V0,说明数字量1000不够大,高位的1应保留。
在第二个时钟脉冲作用下,按同样的方法将次高位置1,使寄存器输出1100(最高位的1保留时)或0100(最高位的1丢掉时),并送入比较器与输入信号Vi进行比较,从而确定次高位的1是否应该保留。按此方法逐次比较,直至最低位比较完后,转换结束。
逐次逼近型A/D转换器的转换时间取决于输出数字位数n和时钟频率,位数越多,时钟频率越低,转换所需要的时间越长。
数值处理(测量数据的标度变换)
综合题。如上。
Ax = (Am-Ao)(Nx-No)/(Nm-No)+Ao
那个“o”是下标“0”
式中,Ao为测量仪器的下限值,Am为测量仪器的上限值,Ax为实际测量值,No为仪器下限所对应的数字量,Nm为仪表上限所对应的数字量,Nx为测量值所对应的数字量。
第四章
非编码矩阵式键盘
画图题。
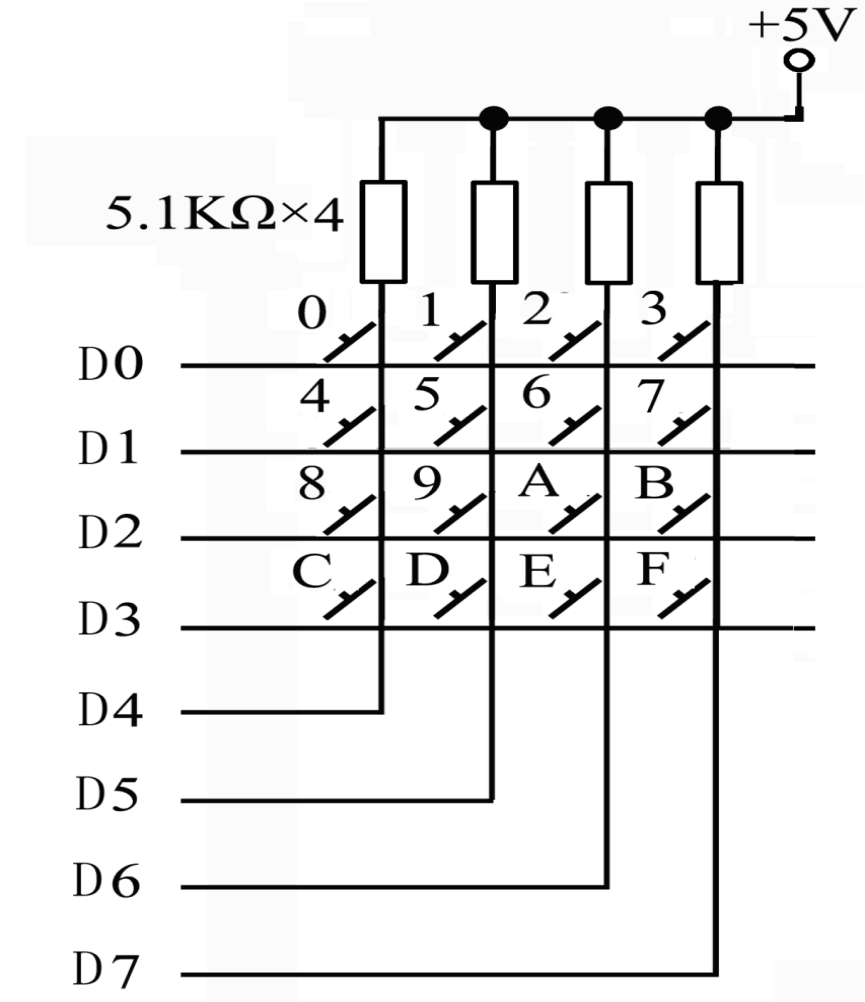
键盘的行信号线和列信号线均由微处理器通过I/O引脚加以控制。微处理器通过输出引脚向行信号线上输出全0信号,然后通过输入引脚读取列信号。若键盘阵列中无任何键按下,则读到的列信号必然是全1信号。如有按键按下时就会产生非全1信号。若是非全1信号时,微处理器再逐行输出0信号,来判断被按下的键具体在哪一行和哪一列上,然后产生被按键所对应的行和列的位置(键码)。
第五章
RS232、RS422、RS485
| 类型 | RS-232 | RS-422 | RS-485 4线 | RS-485 2线 |
| 信号类型 | 单端 | 差分 | 差分 | 差分 |
| 通讯方式 | 全双工 | 全双工 | 全双工 | 半双工 |
| 距离 | 15M@9600bps | 1.2KM@9600bps | 1.2KM@9600bps | 1.2KM@9600bps |
| 信号定义 | TxD, RxD, RTS, CTS, DTR, DSR, DCD, GND | TxA, TxB, RxA, RxB, GND | TxA, TxB, RxA, RxB, GND | DataA, DataB, GND |
| 接线成本 | 高 (8 线) | 中等 (5 线) | 中等 (5 线) | 低 (3 线) |
| 连接设备数 | 两台 | 两台 或 十台 | 32台 | 32台 |
| 抗干扰能力 | 弱 | 强 | 强 | 强 |
| 故障诊断 | 容易 | 难 | 难 | 难 |
ModBus RTU
如下是省流,以下信息均引用自上述链接,妈的老师给的文档太复杂,没法整理,很难入门,只能抄别人的了
Modbus 消息帧

功能码
01H 读取输出线圈
02H 读取输入线圈
03H 读取保持寄存器
04H 读取输入寄存器
05H 写入单线圈
06H 写入单寄存器
0FH 写入多线圈
10H 写入多寄存器
例1:主机对从机读数据操作
主机发送报文格式如下:0x01 0x03 0x00 0x01 0x00 0x01 0xD5 0xCA
含义:
0x01:从机的地址
0x03:查询功能,读取从机寄存器的数据
0x00 0x01: 代表读取的起始寄存器地址.说明从0x0001开始读取.
0x00 0x01: 查询的寄存器数量为0x0001个 Modbus把数据存放在寄存器中,通过查询寄存器来得到不同变量的值,一个寄存器地址对应2字节数据; 寄存器地址对应着从机实际的存储地址
0xD5 0xCA: 循环冗余校验 CRC
从机回复报文格式如下:0x01 0x03 0x02 0x01 0x00 0x17 0xF8 0x4A
含义:
0x01:从机的地址
0x03:查询功能,读取从机寄存器的数据
0x02: 返回字节数为2个 一个寄存器2个字节
0x00 0x17:寄存器的值是0017
0xF8 0x4A: 循环冗余校验 CRC
例2:主机对从机写数据操作
主机发送报文格式如下:0x01 0x06 0x00 0x01 0x00 0x17 0x98 0x04
含义:
0x01:从机的地址
0x06:修改功能,修改从机寄存器的数据
0x00 0x01: 代表修改的起始寄存器地址.说明修改0x0000-0x0001的存储内容
0x00 0x17: 要修改的数据值为0017
0x98 0x04: 循环冗余校验 CRC
从机回复报文格式如下:0x01 0x06 0x00 0x01 0x00 0x17 0x98 0x04
含义:
0x01:从机的地址
0x06:修改功能,修改从机寄存器的数据
0x00 0x01: 代表修改的起始寄存器地址.说明是0x0000
0x00 0x17:修改的值为0017
0x98 0x04: 循环冗余校验 CRC
第六章
单路模拟量输出
多路模拟量输出
D/A转换器
内部的电阻开关网络通常采用倒T型(或称为R-2R型)结构
分辨率:1/(2^n-1)
假设8位D/A转换器,分辨率为1/(2^8-1)=1/255
固态继电器SSR
定义:固态电子元件组成的无触点功率型电子开关
优点:开关速度快、体积小、质量轻、寿命长、工作可靠
特点:无触点无火花
计算机控制系统
工作原理
实时数据采集,实时控制决策,实时控制输出
PID控制
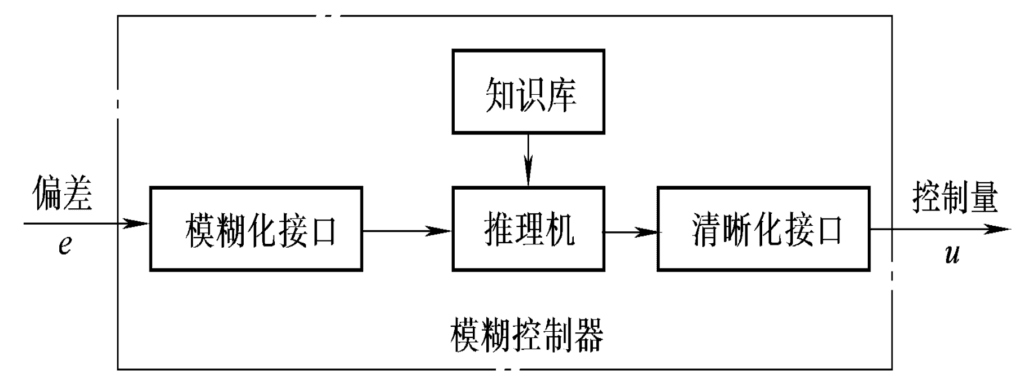
定义:根据偏差的比例(P)、积分(I)、微分(D)进行控制
规律:

KP为比例增益,KP与比例带δ成倒数关系即KP=1/δ,TI为积分时间,TD为微分时间,u(t)为控制量,e(t)为偏差
增量式PID比位置PID算法优点:不需要累加,误差小;误操作影响小;易于实现手动至自动的无冲击切换
数字PID位置型控制算法:

推导:
数字PID增量型控制算法:


模糊控制
第七章
硬件抗干扰
屏蔽技术(静电屏蔽、磁屏蔽、电磁屏蔽),特定器件(TVS、压敏电阻、放电管),抑制干扰源



发表回复